


Darmstadt Dribblers 
Optimal cooperation and control of multi-vehicle teams with nonlinear hybrid systems
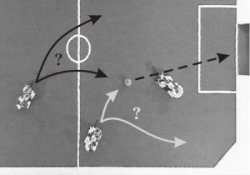
Based on a nonlinear hybrid dynamical systems model methods for optimal coordination and control of multiple vehicles are investigated. The time dependent hybrid state of the overall system consists of discrete (roles, actions) and continuous (e.g., position, orientation, velocity) state variables of the vehicles involved.
The evolution in time of the system's state is described by a hybrid state automaton. This approach enables a tight and formal coupling of discrete and continuous state dynamics, i.e., of dynamic role and action assignment and sequencing as well as of the physical motion behavior of a single vehicle modeled specificly by nonlinear differential equations of motion.
 The problem of optimal hybrid state trajectories that minimize a merit function
as time or energy for optimal multi-vehicle cooperation subject to further constraints is
transformed to a mixed-binary dynamic optimization problem studied numerically.
The problem of optimal hybrid state trajectories that minimize a merit function
as time or energy for optimal multi-vehicle cooperation subject to further constraints is
transformed to a mixed-binary dynamic optimization problem studied numerically.