


Darmstadt Dribblers 
Bionic robots and new actuators
Humanoid Robot Lara

About Lara
Lara ist the first female humanoid robot that is actuated by artificial muscles. She is 130cm tall and she comes with
38 artificial muscles which provides her 6 degress of freedem in each leg and 3 in each arm. The use of muscles instead
of servo motors allows a novel robot design. Servor Motors are usually implemented into the robots joints, in contrast
Lara muscles allows generating joint movements without these restrictions by a large variety of user defined points of
actuation. Lara is lighter than comparable conventional robots. The weight of the in strength and length scalable muscles
is to neglect. Because of this new actuation principle Lara's movements are unique. The design of Lara is created by a
design team of the Hochschule für Gestaltung in Offenbach, Germany.
Lara's muscles
Lara is actuated by a shape memory metal (SMA) called NiTinol. Prestrainend SMAs change their lengths up to 8% when heated
above their transformation temperature. The heating of the muscles is realised by an electric current. Lara's movements are
generated by groups of NiTinol-muscles. Every muscle contains serial-parallel connected NiTinol wires, with a free scalling
possibility of pull-force and length.
Learn more
Find more details about Lara on http://www.lara-robot.de.
A bionic manipulator (the BioRob-Project)
Usually industrial manipulators consist of a rigid kinematic chain built up of several links which are connected
by direct driven linear or rotational joints. In order to move high payloads with high speed and high position
accuracy the slackness in the gears as well as the deformation in the links, which occurs under load, must be
eliminated. This can only be reached using rigid joint actuators and rigid links resulting in heavy and solid
arm constructions. Thus the ratio from load weight to dead weight for industrial manipulators is inferior than
in animals or humans. In addition, because of their unyielding stiffness, industrial robots can be operated efficiently
only in an environment strictly separated from human interaction.
Although biological manipulators are also made up of rigid links (the bones) each joint is usually driven by several,
redundant and highly elastic actuators. With their ease and elegance resulting from the "intelligent" controlled serial
elasticity in the biological actuators, they stand in remarkable contrast to industrial manipulators.
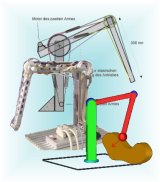
Based on two-joint laboratory model, developed by Professor Möhl at the Universität des Saarlandes, a
scalable multi-body-dynamics-simulation model, extended by a third joint, has been developed. The realistic
simulation enables a systematic design and optimization of the bionic manipulator for different industrial applications.
Learn more
For more information please visit: http://www.biorob.de.